PHD2 (OpenPHD) ist die neue Version der von Craig Stark entwickelten Originalversion PHD. Die Standard-Algorithmen der Nachführung haben sich für die meisten Anwender bewährt und wurden auch für PHDv2 übernommen. Die freie und kostenlose Open-Source-Anwendung ist unter Astrofotografen sehr beliebt und wird vielfach eingesetzt. Auch in der neuen Version sollte man sich mit ein paar Grundlagen und den neuen Beschreibungen der Algorithmen vertraut machen.
Bevor es los geht:
 Wichtiger Hinweis: Weitere Einstellungen, ausführliche Erklärungen und Konfigurationen findet Ihr in der PDF-Anleitung am Ende dieses Beitrags. Alle Werte sind experimentell ermittelt und stellen keine verbindlichen Normwerte da.
Wichtiger Hinweis: Weitere Einstellungen, ausführliche Erklärungen und Konfigurationen findet Ihr in der PDF-Anleitung am Ende dieses Beitrags. Alle Werte sind experimentell ermittelt und stellen keine verbindlichen Normwerte da.
Die Montierung sollte man so genau wie möglich Polausgerichtet aufstellen und die Achsen optimal mit einem leichten Ungleichgewicht ausbalancieren. Mit einem 3-Sterne-Alignment initialisiert man die EQ6 und verbindet die Nachführkamera über den ST-4-Anschluss mit der Montierung. Die Nachführkamera wir in den Sucher gesteckt und mit dem Computer verbunden.
Software-Homepage: PHD2 (OpenPHD)
Aktuelle Version: 2.6.9 (Windows XP, 7 ,8, 10, Mac OS) vom Februar 2020
Aktuelle Sprachdatei: 2.6.4 vom 27.01.2018 - Download PHD2 deutsche Sprachdateien
Neue Funktionen ab Version 2.4.0
- Neu integrierte Profil-Erstellung mit Schritt für Schritt Anleitung.
- Aux-Montierung, die bei Angabe des Deklinationswinkels des Beobachtungsstandort behilflich ist.
- Bad-Pixel-Karte erstellen um Hot- und Cold-Pixel zu markieren. Damit PHD2 nicht an fehlerhaften Pixeln hängen bleibt.
- Deutsche Übersetzung ergänzt.
- Schritt für Schritt Geräte-Konfigurator
Hinweis: die neuen Funktionen werden in der Anleitung erst in den nächsten Tagen ergänzt.
Folgende Fehler kann PHDv2 während der Nachführung korrigieren:
- mechanischen Fehler im Rektaszension-Getriebe, einschließlich dem periodischen Schneckenfehler.
- Atmosphärische Lichtbrechung - Sterne scheinen sich je nach Position am Himmel unterschiedlich schnell zu bewegen
- Schlechte Polausrichtung.
Folgende Fehler können nicht korrigiert werden, die aber dennoch einen gewissen Einfluss haben:
- Atmosphärischer Seeing (Luftunruhe)
- Rauheit, Vibration und Spiel in der Mechanik
- Relativbewegung zwischen der Aufnahme- und Nachführkamera
- Windböen
- schlechte Verkabelung und Steckverbindungen
- Und vieles mehr ...
Schritt 1:
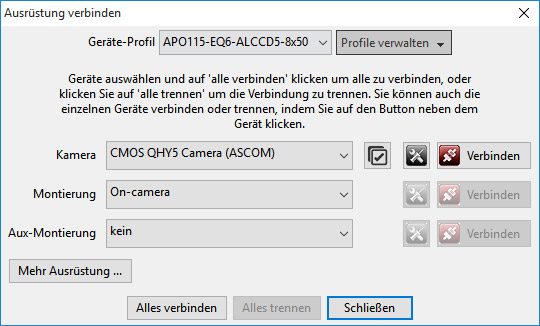 Nun startet man die Anwendung PHD-Guiding. Die Anwendung ist sehr einfach aufgebaut. Neu integriert wurde eine Profilverwaltung für verschiedene Konfigurationen und Einstellungen. Ein Profil besteht aus einer Kamera, Teleskop, Adaptive Optik, Einstellungen und Kalibrationsdaten. Zuerst wählt man die Guiderkamera aus. Bei der ALCCD5 muss der QHY5-Treiber und der entsprechende ASCOM-Treiber installiert werden. Beides findet man auf der Hompage von QHY5. Erst wenn der ASCOM-Treiber installiert ist kann die "CMOS QHY5 Camera (ASCOM)" ausgewählt werden. Für die Montierung wählt man unter "Montierung" das Interface "OnCamera" aus oder das ASCOM-Telescop.
Nun startet man die Anwendung PHD-Guiding. Die Anwendung ist sehr einfach aufgebaut. Neu integriert wurde eine Profilverwaltung für verschiedene Konfigurationen und Einstellungen. Ein Profil besteht aus einer Kamera, Teleskop, Adaptive Optik, Einstellungen und Kalibrationsdaten. Zuerst wählt man die Guiderkamera aus. Bei der ALCCD5 muss der QHY5-Treiber und der entsprechende ASCOM-Treiber installiert werden. Beides findet man auf der Hompage von QHY5. Erst wenn der ASCOM-Treiber installiert ist kann die "CMOS QHY5 Camera (ASCOM)" ausgewählt werden. Für die Montierung wählt man unter "Montierung" das Interface "OnCamera" aus oder das ASCOM-Telescop.
Schritt 2:
Jetzt überprüft man seine Einstellugen (Erklärung weiter unten) und stellt eine Belichtungszeit zwischen 0.5 und maximal 3 Sekunden ein. Darks für die Nachführkamera werden in einer Dunkelbilder-Bibliothek abgespeichert. Aufgeruft wird diese Bibliothek über den Menüpunkt Dunkelbilder. Nun erstellt man ein Dunkelbild indem man auf den Button "Start" klickt. Die Optik wird verschlossen und die Kamera mittelt aus fünf Aufnahmen ein optimales Dark. Um die Sterne zu fokussieren benötigt man ein Livebild der Kamera. Die erhält man beim klicken auf das Loop-Symbol. Sind die Sterne scharf sucht man einen hellen aber nicht gesättigten Stern, der nicht zu nahe am Rand steht, aus und klickt diesen an. Mit der Erweiterung Autoauswahl Stern (ALT+S) kann auch der Leitstern automatisch ausgewählt werden. Der Leitstern wird mit einem Kästchen umrandet, der "Auffindregion".
Schritt 4:
Die Kalibrierung beginnt, wenn man auf dem PHD-Button klickt. Es wird dabei ermittelt wo die Sternposition auf dem CCD-Chip ist, der Drift und die daraus resultierende Geschwindigkeit- und Steuerungskorrektur der Nachführung. Danach geht die Software gleich ins Nachführen über und fertig. Wenn man die Nachführung beenden will klickt man wieder auf den Stop-Button.
Schritt 5:
Optimierung und Korrektur der Nachführung in den erweiterten Einstellung, die sich unter dem Brain-Button verstecken.
Einstellungen für PHD-Guiding:
 Hier eine kleine Erklärung der Funktionen und Steuerungsmöglichkeiten in PHD-Guiding.
Hier eine kleine Erklärung der Funktionen und Steuerungsmöglichkeiten in PHD-Guiding.
Die Einstellungen wurden ermittelt mit folgenden Konfigurationen:
Hauptteleskop: Celestron SC8 oder TS APO 115x800
Montierung: NEQ6, Autoguiding-Speed 1.0
Leitrohr: Antares 8x50 Sucher
Nachführkamera: ALCCD5 (Aktuelle QHY5-Treiber)
1. Wert = Voreinstellung der Software nach der Installation
2. Wert = Einstellung für oben genannte Konfiguration
Weitere Einstellungen gibt es in der PHD-Guiding-Anleitung
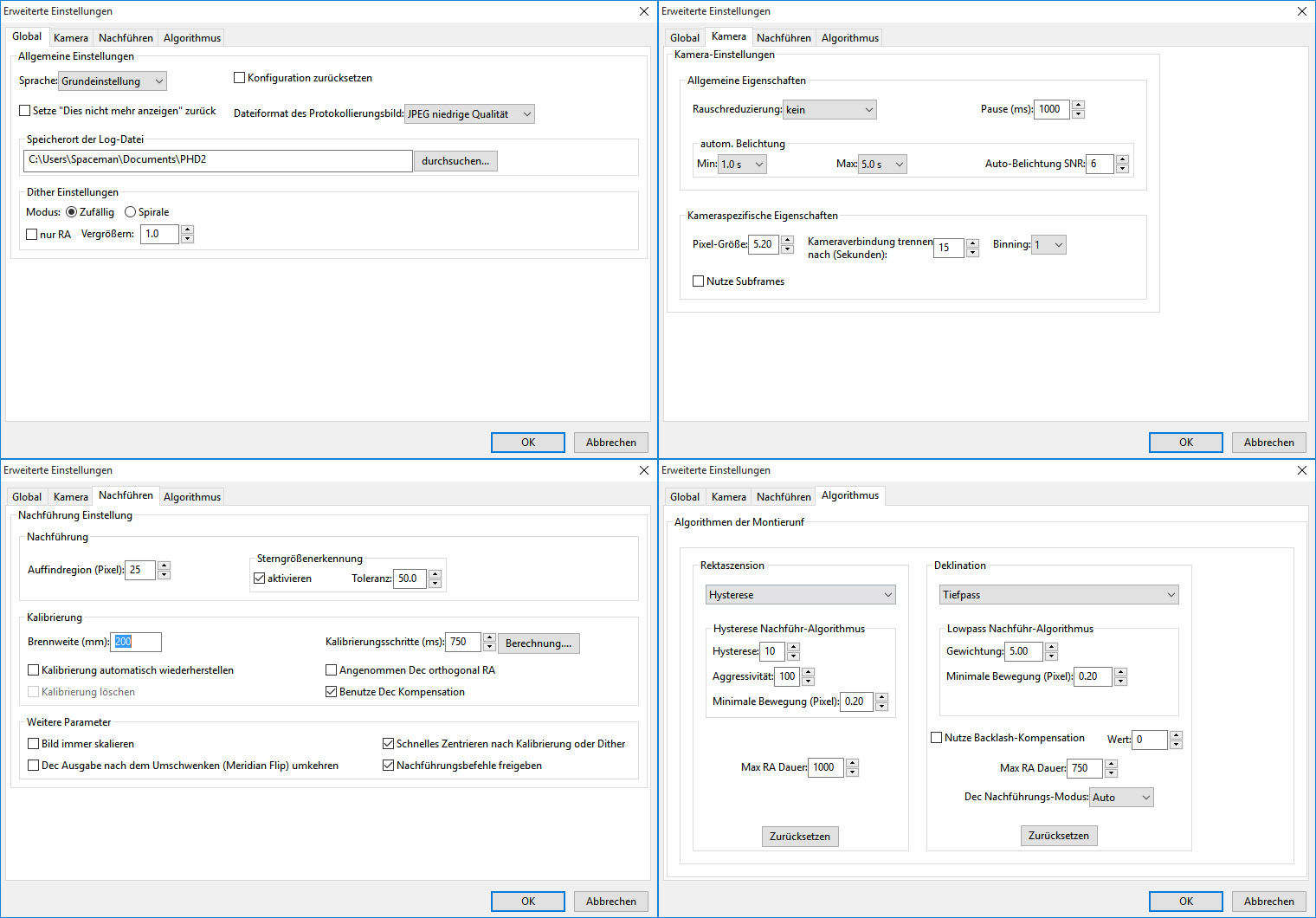
RA Aggressivnes (%) ( 100 | 100 )
Wieviel Prozent der von der Software errechneten Korrektur ausgeführt werden soll. Je größer der Wert, desto stärker wird korrigiert.
RA Hysteresis (%) ( 10 | 10 )
Wieviel Prozent der schon ausgeführten Korrekturen berücksichtigt werden soll. Je größer der Wert, desto geringer wird die Korrektur.
Max. RA Dauer (ms) ( 1000 | 1000 )
Zeitangabe, wie lange ein Impuls maximal in der RA-Achse gegeben wird.
Auffindregion (Pixel) ( 15 | 25 )
Auswahlfeld für den Leitstern
Min. Bewegung (Pixel) ( 0.15 | 0.20 ):
Ab welcher Pixelabweichung des Leitsterns korrigiert wird. Dieser richtet sich nach der Brennweite.
Calibration step (ms) ( 750 | 750 )
Für die Ermittlung der Calibration step sind Pixelgröße der Guiderkamera, Brennweite des Leitrohrs und die Deklination der Himmelsregion notwendig und kann mit dem neu intergrierten Rechner schnell ermittelt werden.
Pause (ms) ( 0 | 1000 ):
Wartezeit zwischen den Belichtungen. Diese Einstellung ist beim Einsatz von Videokameras zum Guiden notwendig. Auch kann man das sogenannte Aufschaukeln der Nachführung vermindern, wenn man zwischen den Aufnahmen eine kleine Pause einfügt. Dies verringert auch die zu übertragende Datenmenge zum Laptop. Bei Objekten nahe dem Himmelspol kann eine größere Pause eingestellt werden. Dagegen sollte bei Objekte, die im Süden nahe dem Horizont stehen, keine Pause eingestellt werden. Auch bei Nachführungen die schon sehr genau und lang ohne Korrektur nachführen können ist das Einstellen von einem Pauseintervall ratsam.
Dec. Nachfügrungsmodus ( auto | auto)
Hier sind vier Einstellungen der Dec-Achsensteuerung möglich. Off, Auto (langsam, sendet Nord- und Süd-Nachführungsbefehle), North (sendet Nachführungsbefehle in Richtung Norden) und South (sendet Nachführungsbefehle in Richtung Süden).
Dec Algorithmus ( Resist switch | Tiefpass):
Spezielle Steuerung der Dec-Achse. Diese wird benötigt um eine unsaubere Pol-Ausrichtung auszugleichen. Der "Lowpass-Filter" ist für eine langsame Korrektur und damit guter Pol-Ausrichtung und "Resist Switch" für eine schlechte Pol-Ausrichtung. Hier werden stärkere Korrekturen ausgeführt.
Dec Gewichtung (Index) ( 5.00 | 5.00 )
Ein Indexwert, der die Gewichtung der DEC-Korrektur noch beeinflusst. Je größer der Wert, desto stärker ist die DEC-Korrektur.
Max. Dec Dauer (ms) ( 100 | 750 )
Zeitangabe, wie lange ein Impuls maximal in der DEC-Achse gegeben wird. Diesen Wert setzte ich gleich dem Wert bei Kalibrierungsschritt (ms).
Sterngrößenerkennung (50.0 | 50.0 )
Aufnahmen mit dem eingestellten Helligkeitsunterschied werden nicht zur Nachführung herangezogen. Je größer der Wert desto mehr Aufnahmen werden für die Nachführung verwendet auch wenn diese einen hohen Helligkeitsunterschied haben. Mit 1.0 ist dies Funktion deaktiv.
Rausreduzierung ( 2x2 | none ):
Rauschreduzierung der Ausnahme
Kalibration löschen:
Wenn ausgewählt, dann startet die Anwendung einen neue Kalibration. Das sollte man immer machen, wenn eine neue Himmelsregion angefahren wurde, die Kameraposition verändert wurde oder neue Einstellungen an der Montierung oder in den Software-Einstellungen vorgenommen wurden.
Nach Kalibration sollte die Nachführung mindestens 10 Minuten laufen, damit einmal der periodische Schneckenfehler erfasst wird. Besser wäre es, die Nachführung 20 - 30 Minuten laufen zu lassen, damit die Nachführung durch die Software optimiert wird.
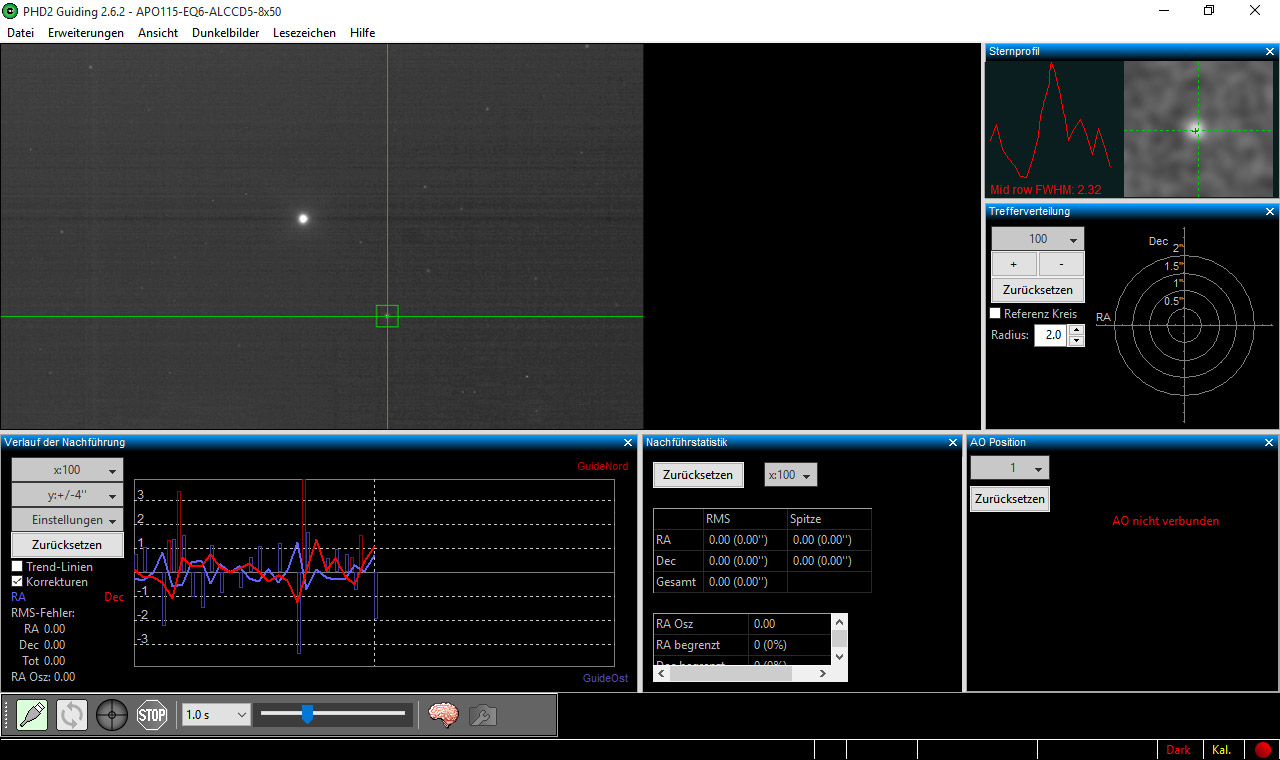
Die grafische Darstellung der Nachführung;
 Um zu sehen, ob die Nachführung gut arbeitet gibt es unter den Tools aus der Menüleiste die Option "Enable Graph". Hier wird ein Diagramm aufgerufen, welches den Verlauf der beiden Achsen grafisch darstellt. Eine Nachführung ist dann gut, wenn jede Achse eine mehr oder weniger gleichbleibende Kurve mit geringen Amplitude darstellt.
Um zu sehen, ob die Nachführung gut arbeitet gibt es unter den Tools aus der Menüleiste die Option "Enable Graph". Hier wird ein Diagramm aufgerufen, welches den Verlauf der beiden Achsen grafisch darstellt. Eine Nachführung ist dann gut, wenn jede Achse eine mehr oder weniger gleichbleibende Kurve mit geringen Amplitude darstellt.
DEC-Kurve drifftet ab:
 Der Drift der DEC-Kurve ist stark von der Genauigkeit der Polausrichtung abhängig. Je genauer diese ist, desto weniger muss man korrigieren. Hier muss man dann etwas experimentieren. ResistSwitch für viele Korrekturen, Lowpass für geringe Korrekturen. Die Richtung der Korretur kann mit North oder South auch angegenen werden. Ist die Korrektur immer noch zu stark, dann kann man die Korrektur in der DEC-Achse deaktivieren.
Der Drift der DEC-Kurve ist stark von der Genauigkeit der Polausrichtung abhängig. Je genauer diese ist, desto weniger muss man korrigieren. Hier muss man dann etwas experimentieren. ResistSwitch für viele Korrekturen, Lowpass für geringe Korrekturen. Die Richtung der Korretur kann mit North oder South auch angegenen werden. Ist die Korrektur immer noch zu stark, dann kann man die Korrektur in der DEC-Achse deaktivieren.
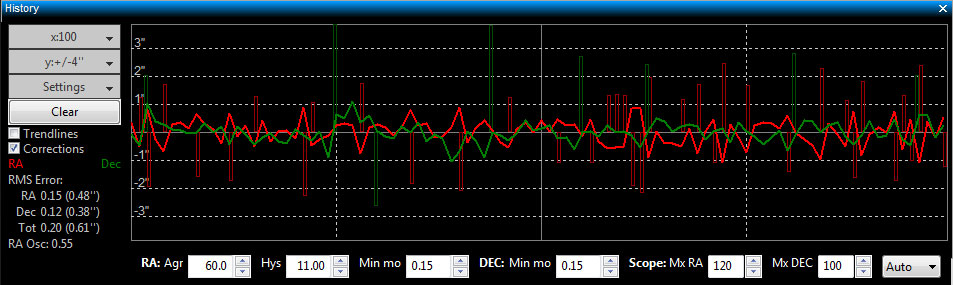
RA-Kurve machen große Ausschläge und der Stern hüpft:
 Die Kalibration ist abgeschlossen und die Nachführung läuft. Jetzt stellt man fest, dass nach einer Weile die RA-Aplituden immer größer werden und auch der Stern anfängt zu hüpfen. D.h. die Nachführung in der RA-Achse ist zu aggresiv. Daher sollte man dann die RA-Aggressivität verringern und/oder die RA Hysteresis (min. 10) erhöhen. Sollte das nichts helfen, dann auch die Autoguider-Rate der RA-Achse in der Montierung verringern.
Die Kalibration ist abgeschlossen und die Nachführung läuft. Jetzt stellt man fest, dass nach einer Weile die RA-Aplituden immer größer werden und auch der Stern anfängt zu hüpfen. D.h. die Nachführung in der RA-Achse ist zu aggresiv. Daher sollte man dann die RA-Aggressivität verringern und/oder die RA Hysteresis (min. 10) erhöhen. Sollte das nichts helfen, dann auch die Autoguider-Rate der RA-Achse in der Montierung verringern.
Zur Optimierung der RA-Korrektur kann der Oscilliation Index (OSC) zur Hilfe genommen werden. Dieser erscheint unten links in der Grafik. Er ist das Ergebis der Abweichung von der gerade ausgeführten und der zuvor ausgeführten Korrektur. Diese Abweichung sollte zwischen 0.5 und 0.3 sein. Wandert der Wert gegen 1.0, dann ist die Korrektur zu aggesiv und man sollte die RA-Aggessiveness verringern und/oder die Hysteresis erhöhen. Geht der Wert gegen 0.1, dann ist die Korrektur der RA-Achse zu gering und die RA-Aggessivtät muss erhöht und/oder die Hysteresis veringert werden.
Probleme bei der Kalibrierung:
Bei der Kalibration kann es vorkommen, da der Stern seine Position auf dem Sensor nicht verändert, dass PHD-Guiding keine Abweichung über einen lägeren Zeitraum feststellen kann. Das passiert gerne bei der DEC-Achse. Wenn dies passiert kommt eine Fehlermeldung und die Nachführung in der DEC-Achse wird deaktiviert. Man kann jetzt die Nachführung einige Zeit laufen lassen um zu sehen, ob der Stern an seiner Position bleibt oder man vergrößert das Zeitintervall zwischen den Aufnahmen (Time laps), damit es zu einer messbaren Abweichung kommt. Wenn die Pause zwischen den Aufnahmen zu lang wird (< 500 ms), dann sollte man eher die minimale Pixelabweichung (Min. motion) verkleinern.
- Leiches Ungleichgewicht in beiden Achsen kann auch helfen das mechanische Spiel zu minimieren.
- Nach erfolgreicher Kalibration die Nachführung mindestens 20 Minuten laufen lassen und die Position des Sterns beobachten.
- Leitstern sollte nicht zu schwach sein. Optimal ist eine Größenklasse zwischen 3 und 5.
PHD2-Guiding deutsche SprachdateienPHD2-Guiding 08-2020 - Kurzanleitung herunterladen